Towards more socially aware robots
My work with the TIER Lab's Misty II and Duckiebots

Developing socially aware robotics through computer vision, interactive gesture recognition, and pose estimation.
Misty mirrors a waving person.
Using obstacle detection to navigate through space.

I reconstructed and textured a 3D model of the Misty II robot in Blender based on the official CAD assembly files, for use in my simulation work.
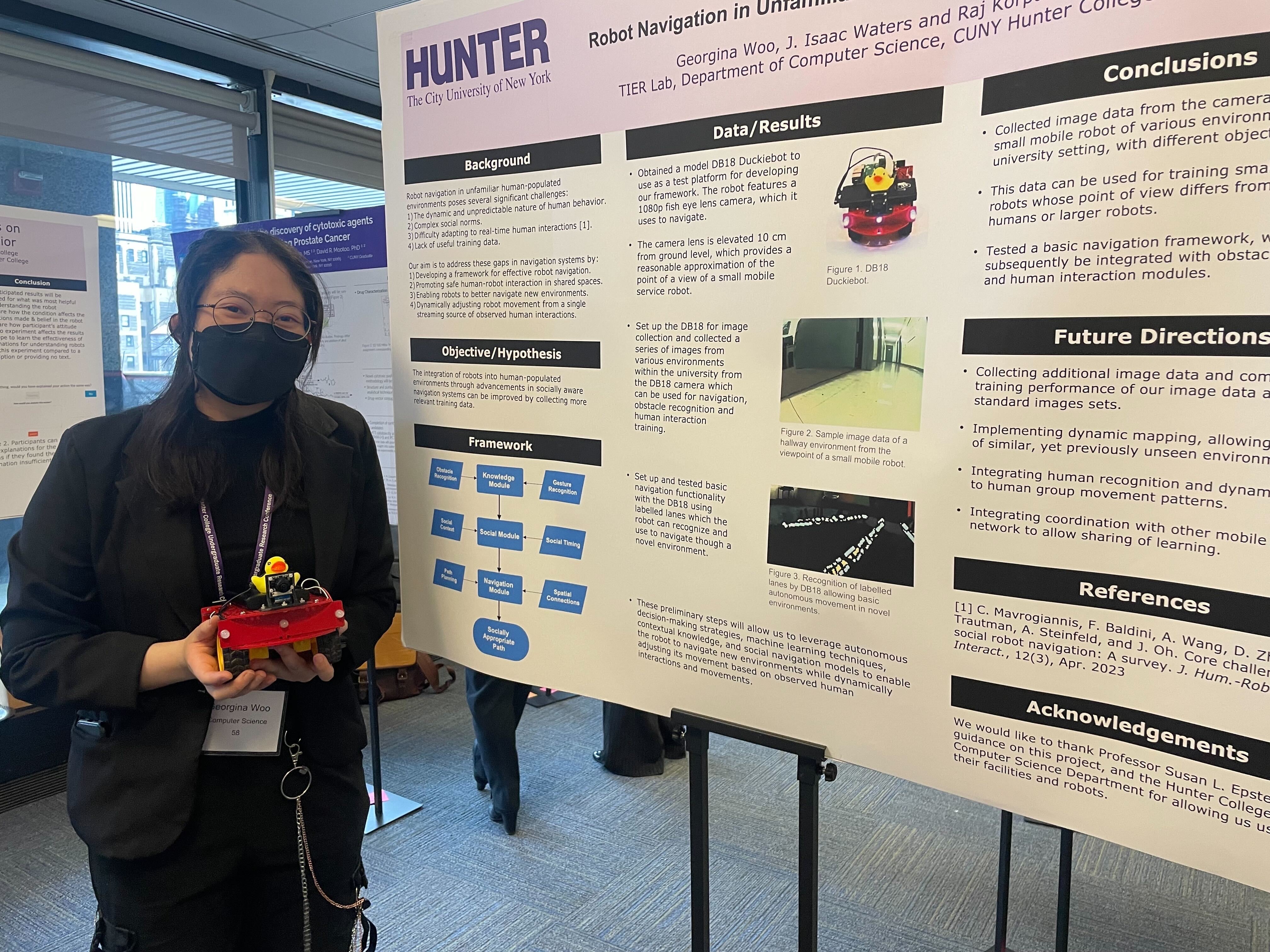
Presenting our work on socially aware robot navigation with the Duckiebot at the Hunter Undergraduate Research Conference 2024.
Presenting our computer vision work for social robot navigation with Misty Hunter Undergraduate Research Conference 2025.